過去の研究
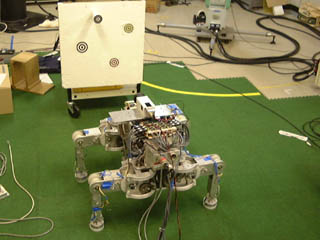
反射的行動に基づく四脚ロボットの歩行の創発
Quadruped Walking Based on Reflective Behaviors
研究背景:
四脚歩行ロボットの制御としてオーソドックスなのは,1:設計者 がペース,トロットなど,ロボットの歩容(歩行パターン)を決める, 2:歩行パターンにしたがって,各脚の動きが決まる,3:そ の脚の動きに基づいて,各関節の目標値が計算される,4:その目標 値に追従するようにサーボを適用する,という方法である.ロボットに視覚セ ンサなどの外界センサが搭載され,環境の観測ができる場合には, センサからの情報に基づいて歩容パターンを変え,上記の手続きに従って環境 変化に適応する.容易に想像がつくように,このような方法を用いた場合,セ ンサからの情報を複数段にわたって処理するため,処理に時間 がかかり,その結果環境に対する反応速度は下がる.また,あらかじめ 決められた歩容の範囲内での適応ができるのみで,状況に応じて脚の動かし方 を柔軟に変化させることは困難である.
研究目的と成果:
本研究の目的は,環境変化に対して柔軟に適応できる四脚ロボット の構築である.環境に対する適応性を向上するためには,環境の状態を観測す る外界センサの信号を,できるだけ速く,しかも直接制御に反映させることが キーとなる(視覚サーボと同じ考え方,サブサンプションアーキテクチャの基 本でもある).
そこで,このような制御を実現するためのアーキテクチャとして,視 覚サーボによる制御と,脚先に備え付けられた力センサに基づく運 脚制御の組み合わせを作り,これによって,陽に歩行/歩容を計画するこ と無しに歩行が創発(emergence)されることを示した.
論文:
- Koh Hosoda, Takahiro Miyashita, and Minoru Asada, ``Emergence of Quadruped Walk by a Combination of Reflexes'', Proc. of the International Symposium on Adaptive Motion of Animals and machines, CD-ROM, 2000.
- Takahiro Miyashita, Koh Hosoda, and Minoru Asada, ``Reflective walk based on lifted leg control and vision-cued swaying control'', Proc. of 1998 BSMEE International Symposium on Climbing and Walking Robots(CLAWAR'98), pp.349--354, 1998.
- Takahiro Miyashita, Koh Hosoda, and Minoru Asada, ``Hybrid Structure of Reflective Gait Control and Visual Servoing for Walking'', Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems 1998 (IROS '98), pp.229--234, 1998.
- Koh Hosoda, Takahiro Miyashita, Susumu Takeuchi, and Minoru Asada, ``Adaptive Visual Servoing for Legged Robots --Vision-Cued Swaying of Legged Robots in Unknown Environments--'', Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems 1997 (IROS'97), pp.778--784 1997.
- Takahiro Miyashita, Koh Hosoda, and Minoru Asada, ``An Environmental Representation for a Legged Robot Based on Visual Guidance'', Proc. of 6th European Workshop on Learning Robots (EWLR-6), pp.121--126, 1997.
- Koh Hosoda, Mitsuhiko Kamado, and Minoru Asada, ``Vision-based servoing control for legged robots'', Proc. of IEEE Int. Conf. on Robotics and Automation, pp.3154--3159, 1997.
関連項目:
- ロボット座標系と世界座標系についての参照フレーム問題
- 視覚サーボ
視覚と力覚を持つロボットの適応的制御系
Hybrid Vision/Force Servoing Control
研究背景:
研究目的と成果:
論文:
関連項目:
カメラのズーム機構を利用した視覚サーボ
Visual Servoing Utilizing Zoom Mechanism
研究背景:
研究目的と成果:
論文:
関連項目:
適応的視覚サーボ
Adaptive Visual Servoing
研究背景:
研究目的と成果:
論文:
関連項目:
マクロ・マイクロマニピュレータシステムの設計と制御
Macro/Micro Manipulator Systems
研究背景:
柔軟なマニピュレータによって,振動やたわみの影響をなるべく押さえて 作業を実現する方法の一つとして,マニピュレータの先端により剛性が高く, 小さいマニピュレータを取り付ける,マクロ・マイクロマニピュレータ(親子 アームなどと呼ばれることもある)の構成が考えられる.例えば,スペースシャ トルに搭載されるアームや,高圧電線作業用のマニピュレータなどにこのよう なマクロ・マイクロマニピュレータが採用されている.
研究目的と成果:
この研究では,柔軟なマクロマニピュレータが生じる振動やたわみを,よ りサイズの小さいマニピュレータで補償できるかどうかを幾何学的に調べ,準 静的な制御によって補償する準静的,あるいはマニピュレータ全体の動力学的 な性質までを考慮して制御する動的軌道制御,そして振動によって生じる力の ふらつきを補償する力制御を提案し,実験的にその有効性を検証している.
論文:
- 吉川恒夫,細田耕,土井利次," マクロ−マイクロシステムによるフレキシブルアームの動的軌道制御", 日本ロボット学会誌,12巻,2号,pp.131-135,1994.
- 吉川恒夫,細田耕,"マクロ・マ イクロシステムによるフレキシブル・マニピュレータの制御",日本ロボッ ト学会誌,12巻,2号,pp.39-44,1994.
- 吉川恒夫,細田耕,土井利次," マクロ−マイクロシステムによるフレキシブルアームの準静的軌道制御", 日本ロボット学会誌,11巻,1号,pp.140-147,1993.
- Tsuneo Yoshikawa, Koh Hosoda, Kensuke Harada, Atsushi Matsumoto, and Hiroki Murakami, ``Hybrid Position/Force Control of Flexible Manipulators by Macro-Micro Manioulator System'', Proc. of IEEE Int. Conf. on Robotics and Automation, pp.2125--2129, 1994.
- Tsuneo Yoshikawa, Koh Hosoda, and Toshitsugu Doi, ``Dynamic Trajectory Tracking Control of Flexible Manipulator by Macro-Micro Manipulator System'', Proc. of IEEE Int. Conf. on Robotics and Automation, pp.1804--1809, 1994.
- Tsuneo Yoshikawa, Koh Hosoda, and Toshitsugu Doi, ``Quasi-Static Trajectory Tracking Control of Flexible Manipulator by Maco-Micro System'', Proc. of IEEE Int. Conf. on Robotics and Automation, pp.(3)210--215, 1993.
関連項目:
フレキシブルアームのモデル化と制御
Modeling and Control of Flexible Manipulators
研究背景:
宇宙でロボットアームを使用する場合,扱う対象物は大きく,そのためにアー ム自体が非常に長尺である反面,打ち上げにかかるコストを小さく するため,重量はできるだけ小さいほうがよい.したがってロボッ トアームは,必然的に剛性が低くなり,振動数の低い振動 を発生する.このような振動を制御し,高速高精度の動きを実現することが必 要とされている.このような問題は宇宙では顕著であるが,地上の長尺な一般 的アームにも発生する問題である.このようなアームのことをフレキシブ ルアームと呼ぶ.
研究目的と成果:
この研究では,フレキシブルアームの振動を押さえ,いかにして制御するかと いう振動制御を実現するため,アームの振動をモデル化する方法,振動を抑制 する制御則,および振動する長尺なアームの先に,小さいマイクロアームを取 り付けて,先端での振動を保証する方法について研究した.
まず振動をモデル化する方法であるが,先端の負荷が非常に大きく,アー ム自体の質量が無視できるような場合の3次元ばね・質量モデル, アーム自体の質量が無視できない場合に,簡単な試行実験によってパラメータ を同定できる仮想剛体リンク・受動関節モデルを提案した.
3次元ばね・質量モデルを用い,3関節2リンクのPUMA型アームについて, 振動抑制制御を導き,実験により制振効果を検証した.
論文:
- Tsuneo Yoshikawa and Koh Hosoda, ``Modeling of Flexible Manipulaotrs Using Virtual Rigid Links and Passive Joints'', The International Journal of Robotics Research, Vol.15, No.3, pp.290--299, 1996.
- 細田耕,吉川恒夫,"平面2自由 度フレキシブルアームの軌道制御",日本ロボット学会,11巻,7号, pp.134-140,1993.
- Tsuneo Yoshikawa, Hiroki Murakami and Koh Hosoda, ``Modeling and Control of a Three Degree of Freedom Manipulator with Two Flexible Links'', Experimental Robotics II, The 2nd International Symposium, Springer, pp.531--545, 1993.
- 吉川恒夫,細田耕,"仮想的な剛 体リンクと受動関節を用いたフレキシブルアームのモデリング",計測自動 制御学会論文集,27巻,12号,pp.1389-1395,1991.
- Tsuneo Yoshikawa and Koh Hosoda, ``Modeling of Flexible Manipulators Using Virtual Rigid Links and Passive Joints'', Proc. of IEEE/RSJ Int. Workshop on Intelligent Robots and Systems(IROS'91), pp.967--972, 1991.
- 吉川恒夫,村上弘記,細田耕, "2本のフレキシブルリンクを有する3自由度マニピュレータのモデリングと 制御",日本ロボット学会誌,9巻,1号,pp.1-10,1991.
- Tsuneo Yoshikawa, Hiroki Murakami and Koh Hosoda, ``Modeling and Control of a Three Degree of Freedom Manipulator with Two Flexible Links'', Proc. of IEEE Int. Conf. on Decision and Control, pp.2532--2537, 1990.
- Tsuneo Yoshikawa, Hiroki Murakami and Koh Hosoda, ``Modeling and Control of a Three Degree of Freedom Manipulator with Two Flexible Links'', Proc. of Japan-U.S.A. Symp. on Flexible Automation, pp.965--971, 1990.
関連項目:
Copyright © Koh Hosoda